MIN-Fakultät
Fakultätfür Mathematik, Informatik
und Naturwissenschaften
und Naturwissenschaften
Foto: pixabay
21. August 2017, von MIN-Dekanat
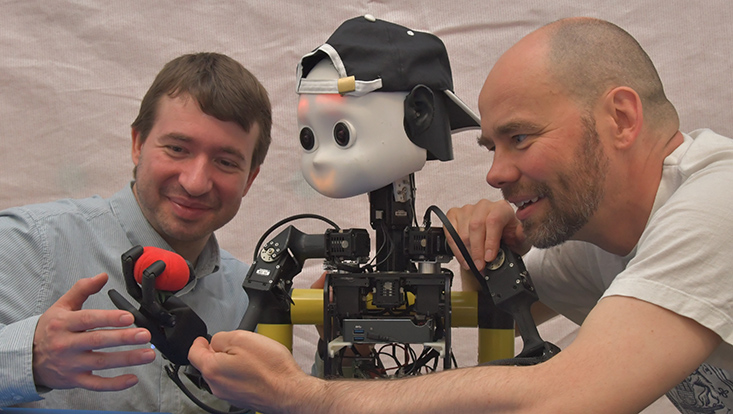
Foto: UHH/Knowledge Technology Institute/Strahl/Kerzel
Auf dem Campus des Informatikums in Stellingen leben Forscherinnen und Forscher, Studierende und Roboter in einer ungewöhnlichen Gemeinschaft - und lernen voneinander Höflichkeit, Freundlichkeit, Respekt und Rücksichtnahme.
NICO ist frustriert. Er hat die rote Stofftomate so unglücklich vor sich auf den Tisch gelegt, dass er sie nicht wiederaufnehmen kann. Der kleine Roboter hebt den Kopf und guckt traurig nach vorne: die Augenbrauen nach außen gekippt, die Mundwinkel hängen. „Nicht so schlimm, NICO“, tröstet sein Lehrer Matthias Kerzel und legt ihm die Tomate wieder in die Mitte. „Versuch’s noch mal.“ Erleichtert entspannen sich die Gesichtszüge des Roboters. Er senkt den Kopf, schaut konzentriert auf die Tomate, streckt seine Hand aus, findet sie auf Anhieb – und lächelt.
NICO, kurz für Neuro-Inspired COmpanion, ähnelt mit Absicht sowohl in seinen Gesichtsausdrücken als auch mit seiner Körpergröße in etwa einem dreieinhalbjährigen Kind. „Es soll ja Spaß machen, mit ihm zu arbeiten“, erklärt Kerzels Kollege Erik Strahl. Die beiden Forscher arbeiten in der Arbeitsgruppe Knowledge Technology unter der Leitung von Prof. Dr. Stefan Wermter, zwei NICOs und sieben kleineren NAO Robotern in einer Art Roboter-Menschen-Schule im Informatikum der Universität Hamburg. Denn die Roboter sollen lernen, sich in einer von Menschen bewohnten Umgebung so menschlich wie möglich zu verhalten. Ziel ist es, Roboter zu entwickeln, die als Altenpfleger oder als Haushaltshilfen arbeiten können, ohne dass sie als störend oder unheimlich empfunden werden. "Wir sind sehr damit beschäftigt, unsere Robotassistenten bei uns auszubilden, damit sie insbesondere lernen, besser sehen, hören, greifen und verstehen zu können“, betont Prof. Wermter. „Dabei hilft uns insbesondere auch die Förderung aus unserem DFG-Transregio "Crossmodales Lernen" und unsere EU Marie Curie Projekte Socrates und Secure, bei denen die Mensch-Roboter-Interaktion im Vordergrund steht."
Für die Roboter ist das ein weiter Weg. „Im Fernsehen können humanoide Roboter fast alles, was wir auch können – aber das ist bislang noch Science Fiction“, erklärt Kerzel. „Die meisten Roboter sind Industrieroboter und können nur genau eine einzige Aufgabe erledigen.“ Menschen würden sie bei der Ausführung dieser Aufgabe, wie zum Beispiel dem Ausstanzen von Metallteilen in der Autoproduktion, nur behindern. Also wird streng darauf geachtet, dass kein Mensch diesen großen Kollegen von NICO in die Quere kommt. Sie können keine Rücksicht auf ihn nehmen und würden ihn möglicherweise verletzen. In der Roboter-Schule aber gelten ganz andere Spielregeln: Höflichkeit, Freundlichkeit, Respekt und Rücksichtnahme.
„Um unter Menschen leben zu können, muss NICO lernen, sehr flexibel auf eine sich ständig verändernde Umwelt zu reagieren“, beschreibt Kerzel die Aufgabe seines Schützlings. Den Weg dahin kennt jedes Kind, das sich mit dem ABC und dem Einmaleins auseinandersetzen muss: üben, üben und noch mehr üben. Mit der Tomate kann NICO sich stundenlang beschäftigen. Er hebt sie auf, legt sie an einem anderen Ort wieder ab und startet den Vorgang erneut. Mit jedem Griff speichert er neue Informationen über diesen Vorgang ab – er lernt. Am Anfang muss noch ein weiterer „Lehrer“ – Kerzel oder ein Studierender - neben ihm sitzen und ihm helfen, wenn er danebengreift. Aber mit jedem Griff wird NICO sicherer. Und bald traut er sich an schwierigere Aufgaben. „Zum Beispiel aus unterschiedlichen Richtungen nach dem Objekt zu greifen oder es zuerst zu sich heranzuziehen, bevor er es aufnimmt“, erklärt Kerzel. Das ist mühselig und erfordert viel Geduld. „Etwa ein bis zwei Monate dauert es, bis wir erste Erfolge mit einer neuen Aufgabe erzielen.“
Bevor NICO zur Schule ging, war er Profi-Fußballer. Er wurde geboren als NimbRo-OP, designt von der Arbeitsgruppe Künstliche Intelligenz der Universität Bonn für die RoboCup TeenSize League. Damit fehlten ihm aber, als er nach Hamburg kam, wesentliche Elemente, die er als Fußballspieler nicht brauchte. NICO besaß keine Hände und seine Arme hatten nur wenige so genannte Freiheitsgrade, Gelenke, die er frei bewegen konnte. „Aber er hatte zwei wesentliche Vorteile gegenüber anderen Modellen“, erklärt Strahl. „Er hat ein offenes Design, das wir mit Teilen aus unserem 3D-Drucker völlig verändern können, und in den letzten Jahren konnten wir deshalb den gesamten Oberkörper für den NICO völlig neu aufbauen und auf das Greifen von Objekten ausrichten.“
Bevor die Forscher mit ihm arbeiten konnten, mussten sie NICO also zunächst einmal Hände geben. Statt einer Klaue hat NICO nun wahlweise Hände mit drei oder vier Fingern. Mit drei Fingern ist es einfacher, etwas zu greifen, mit Daumen und drei Fingern sind dagegen sehr viele verschiedene Griffe und Gesten möglich. „Die Hände hat ein Start-Up aus Spanien teilweise mit uns entwickelt und wir sind mit die ersten Nutzer“, erzählt Strahl. NICOs Fußballerbeine baumeln derzeit ungebraucht vom Kinderstuhl, auf dem er sitzt, herunter. Der zweite NICO der Arbeitsgruppe hat mittlerweile gar keine mehr, er ist fest auf einem Ständer montiert. „Bei ihm forschen wir an der Erkennung menschlicher Emotionen, dazu braucht er halt keine Beine“, erklärt Strahl.
Für den Kopf haben sich die Forscher vom iCub inspirieren lassen, eine offene Forschungsplattform für Kognition in Europa. Das Gesicht spielt die volle Klaviatur des Kindchenschemas. Wenn NICO einen mit großen Kameraaugen anschaut, will man unwillkürlich „ooooohhhhh“ sagen. Das kann NICO sogar hören - mit zwei Mikrophonen, geschickt versteckt in Ohrmuscheln aus dem 3D Drucker. „Es ist eine schwierige Gradwanderung“, erklärt Strahl die Physiognomie. „Einerseits soll ein Roboter, der mit Menschen interagiert, natürlich möglichst menschliche Züge haben. Wenn er aber zu realistisch ist, löst das Unbehagen aus.“ Die niedliche Kopfform mit den großen Kulleraugen ist ein gelungener Kompromiss.
Hinter der milchweißen Oberfläche des Gesichts liegen drei Tafeln mit LEDs, zwei an der Stelle der Augenbrauen und eine dort, wo der Mund ist. Will NICO Freude ausdrücken, erscheinen über seinen Augen zwei leicht nach außen abgeschrägte Linien, der Mund ist ein nach oben offener Bogen. Für Ärger kippen die Augenbrauenstriche nach innen, der Mund wird zum liegenden O. Mit seinen Gesichtsausdrücken soll NICO nicht nur seine eigenen Emotionen kommunizieren, sondern auch die seines menschlichen Gegenübers spiegeln: Freut sich der Mensch, freut NICO sich mit. Bei einem Lächeln ist das noch leicht. Doch wie sieht Überraschung aus? Bei einer Studie mit 20 Teilnehmerinnen und Teilnehmern kam es durchaus vor, dass ein Gesichtsausdruck des Roboters unterschiedlich interpretiert wurde. „Wenn aber nicht einmal Menschen einheitlich Gesichtsausdrücke erkennen können, ist es natürlich schwierig, einem Roboter beizubringen, das verlässlich zu tun“, erläutert Strahl die Problematik. Auch für Lachen und Bedauern gilt also: üben, üben und noch mehr üben.
Neben grundlegenden Fähigkeiten lernen die Roboter in der Schule aber auch Alltagstätigkeiten, wie in der Hausarbeit mitzuhelfen. Das haben Studierende in einem Projekt einem der kleinen NAO-Roboter beigebracht. Ein Schildchen klebt auf der Brust des grauen Roboters: „Sneezy“. „Wir haben ja sieben NAOs“, lacht Strahl, „damit wir sie auseinanderhalten können, haben wir sie nach den sieben Zwergen aus dem Disney-Film benannt“. „Sneezy“ kann Kaffeetassen einsammeln und in die Küche bringen. Auf Beinen wäre diese Aufgabe allerdings schwierig zu meistern. Zu oft lassen Studierende einen Rucksack oder eine Jacke auf dem Fußboden liegen, die zur Stolperfalle werden können. „Sneezy“ gleitet auf einer runden Plattform durch die Räume, ähnlich wie ein autonomer Staubsauger. Hilfsbereit rollt er von Mensch zu Mensch und fragt: „Soll ich Deine leere Kaffeetasse wegbringen?“ Nach ihr zu greifen würde ebenfalls „Sneezys“ Fähigkeiten übersteigen – sie sind zu schwer für seine kleinen Plastikhände und ihre Positionen auf den Schreibtischen der Mitarbeiter viel zu unterschiedlich. Also bittet er höflich um Hilfe: „Kannst Du sie mir auf mein Tablett stellen?“ Hat „Sneezy“ genügend Tassen beisammen, macht er sich auf den Weg in die Küche. Dort steht die Spülmaschine, auch sie ist für ihn ein noch viel zu komplexes Objekt. Aber „Sneezy“ weiß sich auch hier zu helfen. Er wartet, bis ein Mensch die Küche betritt und fragt ihn um Hilfe beim Einräumen. Wie gut, dass auch die NAOs Gesichter nach dem Kindchenschema haben: Jeder wäre begeistert über einen Vierjährigen, der freiwillig Kaffeetassen in die Küche bringt - und würde ihm nur zu gerne helfen, sie richtig in den Geschirrspüler einzuräumen.
Manchmal muss es gar keine Kaffeetasse sein, an der Höflichkeit, Freundlichkeit, Respekt und Rücksichtnahme praktiziert werden. Viel öfter sind es selbstverständliche Kleinigkeiten, die das harmonische Zusammenleben von Mensch und Roboter erleichtern. „Wenn ich zum Beispiel am Abend nach Hause komme, es schon dunkel ist und mein Roboter nun aber zufällig genau vor dem Lichtschalter steht, dann will ich nicht mein Laptop rausholen müssen, um ihm erst einmal den Befehl für einen Schritt seitwärts zu geben“, erklärt Kerzel. „Dann will ich ihm einfach wie einem normalen Menschen sagen können: „Geh‘ mal bitte ein Stück zur Seite“, oder „Mach‘ bitte den Lichtschalter frei“ – und er soll mich verstehen.“
Demnächst geht NICO sogar auf Klassenreise. Auf der diesjährigen RO-MAN (International Symposium on Robot and Human Interactive Communication) Konferenz in Lissabon wird er der Forschungsgemeinschaft erstmals als eine Plattform für Mensch-Roboter-Interaktion und neuro-kognitive Modelle vorgestellt [1]. Wenig später wird auf der ICANN (International Conference on Artificial Neural Networks) berichtet werden, wie NICO mit Hilfe eines künstlichen neuronalen Netzwerks gelernt hat, Gegenstände zu greifen [2]. „Die Arbeit am Roboter in unserer „Schule“ macht sehr viel Spaß“, erläutert Kerzel. „Aber wir haben NICO ja in erster Linie entwickelt, um unsere Forschung in speziellen Bereichen, wie neuronalen Netzwerken, voranzubringen.“
[1] M. Kerzel, E. Strahl, S. Magg, N. Navarro-Guerrero, S. Heinrich, and S. Wermter, “NICO – Neuro-Inspired COmpanion: A developmental humanoid robot platform for multimodal interaction,” in Proceedings of the IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN). IEEE, 2017 accepted.
[2] M. Kerzel and S. Wermter, “Neural end-to-end self-learning of visuo-motor skills by environment interaction,” in International Conference on Artificial Neural Networks (ICANN), 2017 accepted.
Für Rückfragen:
Dr. Angelika Franz
Universität Hamburg
Fakultät für Mathematik, Informatik und Naturwissenschaften (MIN)
Dekanat
Tel.: +49 40 42838-8109
E-Mail: angelika.franz"AT"uni-hamburg.de